技术巡猎 零跑 车辆控制方法、装置、驾驶辅助系统及车辆---辅助驾驶一直以来普通人会有个误区,觉得它在坡道上跟平路差不多,无非就是“该加速就加一点,该减速就减一点”,可这恰恰是最容易出事的地方。因为坡道不是简单多了个角度,而是整车纵向控制里,重力突然开始参与决策了。
零跑这份专利,解决的就是这个问题:当车在上坡、下坡跑辅助驾驶时,系统到底该让电驱来管,还是让制动来管,怎么做切换,才能既安全又不顿挫。
问题出在哪呢?先举个最容易理解的场景。下坡跟车,系统希望车“轻微加速”去贴近前车。按照很多传统逻辑,只要需求加速度大于0,就把请求发给动力系统。听起来没毛病吧?但下坡时,重力本身就在帮你往前拽,车已经天然有加速趋势了。这个时候,系统尽管说的是“我要加速”,但物理上真正需要的,可能反而是一点点负扭矩,也就是要稍微拖住它,别让它太快了。如果控制器没看明白这层关系,还按“正加速度=给动力”去做,车速就容易超预期。
上坡也是一样。比如系统想让你温和减速,表面上看是负加速度,于是很多方案会直接使用制动系统。但上坡本身就带着天然减速效应,重力已经在往后拽车了。这时候真正合理的动作,不是再补一脚刹车,而是让动力系统给一点正扭矩“托住”车,把减速幅度控制在目标范围里。不然车就会掉速过多,体验上就是很别扭,先拖一下,再补一下。想透这件事很重要:不能只看“系统想加速还是减速”,要先看“这台车在当前坡度、当前车速、当前质量下,真实需要多大的纵向力和扭矩”。
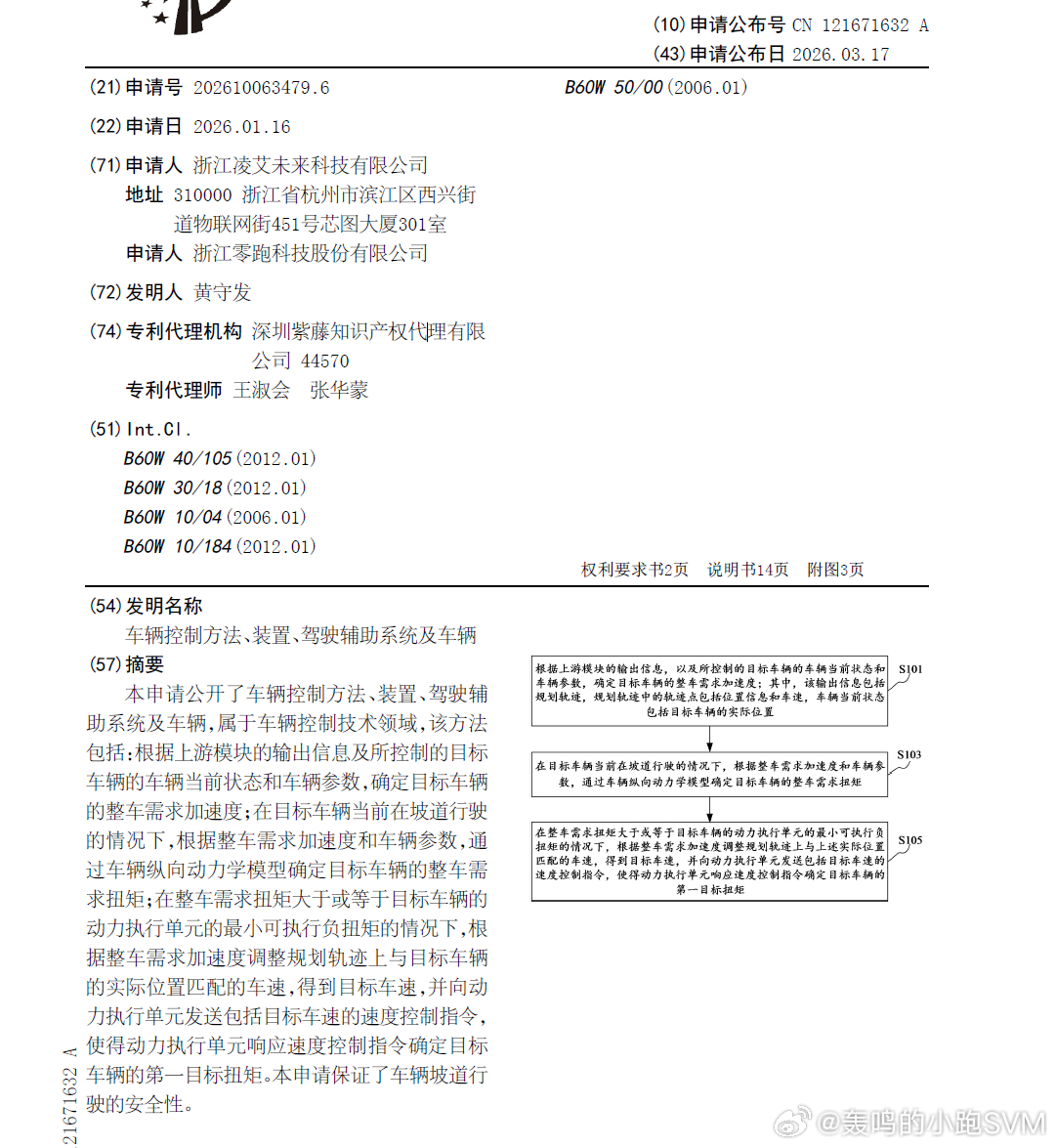
零跑的做法分三步。第一步,上游模块先给出规划轨迹,里面不只有路线,还有对应的车速信息。系统再结合车辆当前位置、当前状态和车辆参数,算出整车需求加速度。这里用的是MPC,也就是模型预测控制。你可以把它理解成,系统不是只看眼前这一秒,而会把接下来一小段轨迹一起考虑,尽量让车沿着规划的节奏去走,同时兼顾误差、控制动作幅度、舒适性。专利里写得比较完整,它会根据规划轨迹、实际位置和车辆参数构建横纵向误差模型,再通过二次规划求解出最优控制输入序列,其中起始控制输入里的纵向加速度,就是当前要执行的整车需求加速度。
第二步,是把“加速度需求”翻译成“扭矩需求”。系统会把整车质量、滚阻、风阻、迎风面积、坡度角、车速这些都带进去,先算出车辆纵向总需求力,再结合轮胎有效滚动半径、变速箱传动比、主减速器传动比和传动效率,最后得到整车需求扭矩。
第三步,才是最关键的执行决策。系统会先看这个整车需求扭矩,是否大于等于动力执行单元的最小可执行负扭矩。这个点特别重要,说明它开始正视一个现实:电驱虽然既能输出正扭矩,也能输出负扭矩,但不是所有负扭矩区间都能稳定、准确地干活。这个最小可执行负扭矩一般在-500N·m到-3000N·m之间。也就是说,只要当前需求还在动力系统“能稳稳接住”的范围内,系统就优先走动力侧,但不是直接丢一个扭矩指令过去,而是把规划轨迹中与当前位置匹配的车速做调整,生成目标车速,再向动力执行单元发速度控制指令。后面动力系统再结合坡度做前馈扭矩,结合目标车速和实际车速差做PID反馈扭矩,两者叠加形成最终目标扭矩。
很多人以为这里的核心是“扭矩算得更准了”,其实更关键的是切换控制入口。以前更像是:给我一个加速度就好。现在变成:把车速控制在该有的区间里。别小看这个变化,坡道这种工况里,速度目标往往比抽象的加速度请求更适合拿来约束执行器,因为它更贴近最终用户感受到的结果。你坐在车里,不会感知“刚才控制器发的是0.3m/s²还是0.2m/s²”,你只会感知这车是不是忽快忽慢,是不是有窜动。
当然专利也没一根筋地全交给动力系统。要是上一时刻已经在请求制动执行单元,且当前扭矩低于制动退出负扭矩,或者整车需求扭矩已经低于动力系统最小可执行负扭矩,那就继续把整车需求加速度发给制动系统,让制动来完成第二目标扭矩。这个细节的意义在于避免来回横跳。执行器切来切去是比较可怕的,今天找VCU,下一秒找ESC,车就容易顿挫,这个退出条件本质上是在做平顺性管理。
辅助驾驶看起来都能跑直线、能跟车、能刹停,宣传页上区别不大。但坡道、匝道、起伏路的地方,这些底层控制差距就出来了。往后卷到深水区,拼的不会只是激光雷达多几线、算力多几TOPS,像这种坡道纵向控制的底层细活,是体验的基石了。